
Previously we had blogged about how the navigation systems aboard Apsaras work. Dave has wanted to make several improvements to this system. First he made it so that the ship's built in auto pilot can be controlled from the Open CPN moving map system. This means he can program a route around obstacles like reefs and such and the boat will now steer itself along the entire route.
Second, he wanted to eliminate the need for the laptop to have an external USB connected GPS antenna. The boat's built in navigation system already has a GPS, so it would be nice to be able to navigate using the built in GPS. Additionally, he would like to be able to see the depth and rudder position on the moving map as well. This means he has to be able to connect the boat's Seatalk bus where all that information resides to the USB port on his laptop. To accomplish this, he wrote some code for a small microprocessor board called a "Teensy" (an Arduino variant). This small board can now convert the information on the Seatalk bus to USB.
Here is what the little Teensy board looks like:

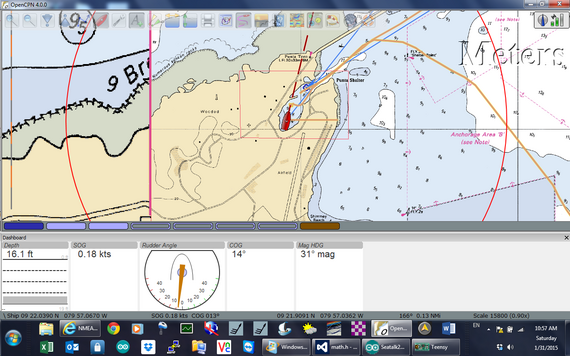
And here is what the new screen integrated into Open CPN looks like - all the boxes at the bottom for depth, SOG, rudder angle, COG, and Mag HDG are new:
Next he plans to work on the Teensy board to make the conversion work the other direction - so that he can also add autopilot controls to Open CPN that allow him to put in +/- 1 or 10 degrees of correction. So that even if Open CPN is steering along a route, you can control the auto pilot to steer around obstacles such as deadheads in the water.